人形机器人行业主要上市公司:小米集团 -W ( 01810.HK ) ;双环传动 ( 002472.SZ ) ;步科股份 ( 688160.SH ) ;鸣志电器 ( 603728.SH ) ;江苏雷利 ( 300660.SZ ) ;恒帅股份 ( 300969.SZ ) ;绿的谐波 ( 688017.SH ) ;中大力德 ( 002896.SZ ) ;汇川技术 ( 300124.SZ ) ; 秦川机床 ( 000837.SZ ) ;长盛轴承 ( 300718.SZ ) ;奥普光电 ( 002338.SZ ) ;埃斯顿 ( 002747.SZ ) 等
本文核心数据:人形机器人软硬件架构、人形机器人 FSD 视觉方案
整体框架:软件决定人形机器人高度,算法需与硬件匹配
人形机器人本质是 AI 系统落地物理世界的最佳载体,算法是核心,需与硬件匹配。机器人的输出包含了虚拟与物理两种能力。虽然人形机器人从本体硬件上看,存在抗压硬度与灵敏度不足的问题,但更核心问题在于是算法对运动能力的控制,包括本体平衡、行走的步态、手部抓取等规划与控制。这需要成熟的感知系统基础、强大的算法分解任务和规划动作、大模型不断仿真训练以及超强的算力支撑。同时要求,算法与硬件相匹配,这要求机器人企业需自研算法,并持续更新迭代。
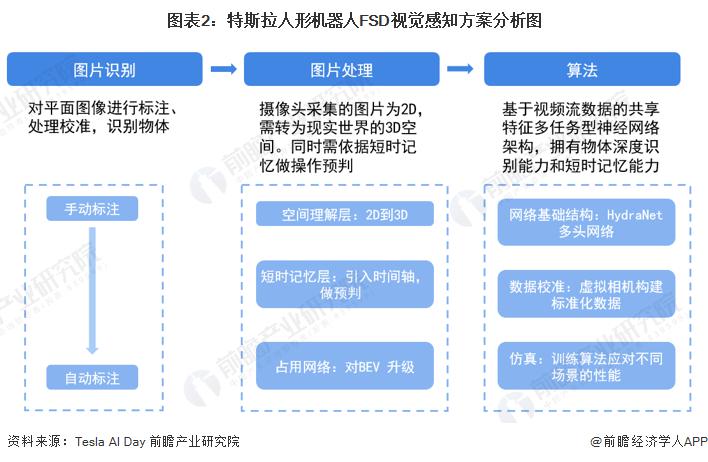
 感知:FSD 视觉方案渐趋成熟
感知:FSD 视觉方案渐趋成熟
特斯拉FSD 纯视觉深度学习神经网络渐趋成熟,可嫁接至人形机器人。与自动驾驶类似,人形机器人同样需利用传感器 ( 摄像头、激光雷达等 ) 感知、采集和处理周围环境信息,以便做出决策。特斯拉人形机器人仅使用 3 个摄像头 ( 中间鱼眼摄像头、左右各一个视觉摄像头 ) ,直接嫁接 FSD 成熟的纯视觉方案,再辅之以力力矩声学触觉温度等传感器。
 决策:人形机器人行为规划难度较高
决策:人形机器人行为规划难度较高
人形机器人决策难度更高:决策层依据感知层获取的信息进行决策判断,来控制机器人身体做出动作规划并下发指令。特斯拉人形机器人与 FSD 底层模块打通,一定程度上算法可复用,但人形机器人需完成人类各种动作,动作连续复杂、需频繁的物理交互且操作因果性多,算法难度远高于自动驾驶。
随着人工智能大模型的快速发展,ChatGPT 能够助力人形机器人拆解任务。大语言模型擅长推断语言条件,并利用其代码编写能力,拆分任务,给出运动规划的目标函数。
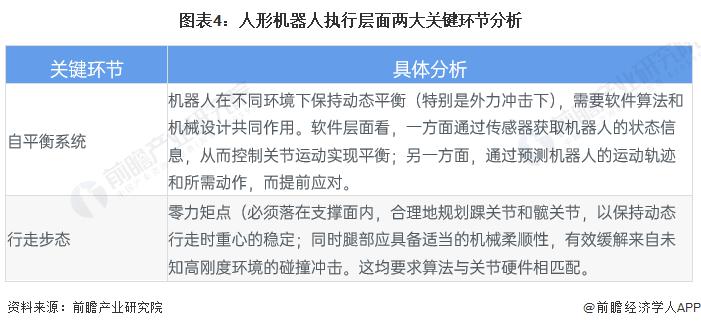
 执行:人形整机平衡与行走步态是关键
执行:人形整机平衡与行走步态是关键
人形机器人执行层指的是系统在做出决策后,对机器人本体做出控制。机器人各操控系统都与决策系统相链接,并按指令精确执行。其中,人形整机平衡与行走步态是最基本也是最关键的两个环节:
 仿真:算法训练可提升机器人智能化水平
仿真:算法训练可提升机器人智能化水平
仿真的目的在于评估机器人结构和算法的设计,包括机器人的运动、工作环境、感知等,意义在于通过仿真模型快速、低成本、高安全性地训练机器人的算法。通过仿真,可加快软件更新迭代,同时缩短算法与硬件调整时间,极大提高训练效率。另外,随着芯片与 AI 技术的发展,未来端到端训练有望突破,人形机器人具身智能未来可期。
来源:前瞻网















